

The NASA demonstration last year in which a Bell Autonomous Pod Transport (APT) 70 cargo drone flew autonomously through the Dallas-Fort Worth metropolitan area identified gaps in command-and-control (C2) and detect-and-avoid (DAA) capabilities that warrant further study.

That’s according to the final report that Bell submitted to NASA for the two-year Systems Integration and Operationalization (SIO) activity, which aimed to help establish standards for commercial operations of unmanned aircraft in the national airspace. Bell was one of three companies that partnered with NASA on the project, along with General Atomics and American Aerospace Technologies.
In its concluding flight demonstration on Sept. 28, 2020, Bell’s APT 70 drone — which can carry payloads of 70 pounds (30 kilograms) or more — simulated a critical medical transport mission by flying a pre-programmed route along the Trinity River, including transitions into and out of Class B airspace. According to Bell’s report, of several scenarios considered for the demonstration, the medical transport mission was deemed the most challenging from a beyond-visual-line-of-sight (BVLOS) perspective due to the noisy radio frequency (RF) environment, the challenges of radio line-of-sight due to infrastructure obstacles, and the DAA complications of a low-altitude urban environment.
Numerous safety precautions were taken for the demo, beginning with careful route selection and including a visual observer in a chase helicopter to see and avoid other traffic.
Bell’s C2 package included two independent (Persistent Systems and Silvus StreamCaster) radios operating on different frequencies, a Troll Systems MT-300 auto-tracker antenna, and two Ubiquiti EdgeRouter arbitrators: one on the aircraft and one on the ground control station (GCS).
The airborne DAA system, developed by Xwing and integrated by Bell, consisted of two Echodyne EchoFlight radars, three FLIR HD ethernet cameras, and a uAvionix ADS-B receiver. Data was processed onboard the aircraft using two commercial off-the-shelf computers, with tracks, alerts, and maneuver recommendations sent to the GCS through the C2 datalink.
The demo revealed C2 technology gaps for remote BVLOS landings. According to the report, “direct line-of-sight RF links will lose link as an aircraft descends to its remote landing location unless some additional technology is implemented,” which could include a remote radio link to the GCS, satellite communications, or LTE technology. “Additional research is needed for low-SWaP [size, weight and power] technology to accomplish this task,” the report states.
The report also raises concerns about possible bandwidth limitations for the live video feeds that remote pilots will need to evaluate BVLOS landing zones: “Depending on the nature and quality of such imagery, the bandwidth for CNPC [command and non-payload control] radios may not be adequate for these operations.”
Bell recommends more research to establish the required image quality and refresh rate for safe landing zone determination, and to find alternate methods for verifying remote landing zones while using limited CNPC bandwidth radios.
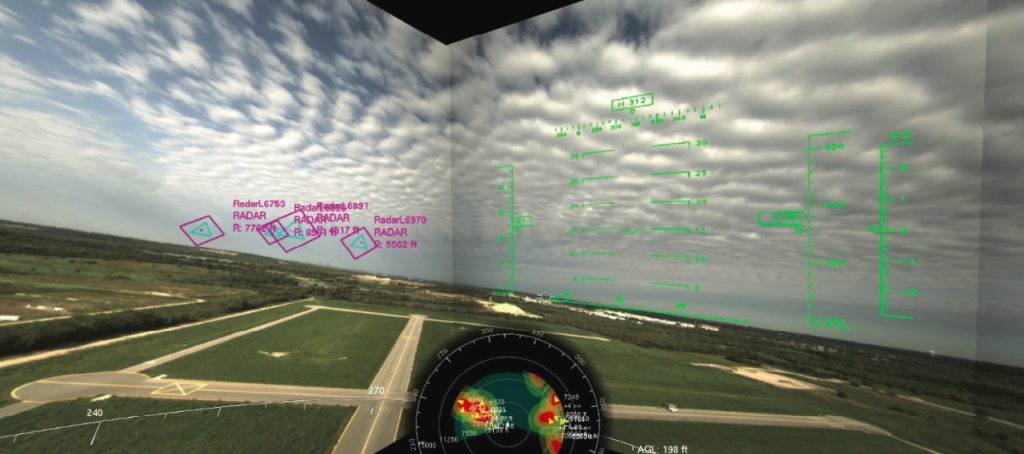
Additional technology gaps were identified on the DAA side. Radar ground clutter caused spurious reflections and false detections during the low-altitude flight demonstration, while the added filtering employed to reduce ground clutter reduced the detection range of the radars to a little over a mile — less than the required detection range to avoid non-cooperative air traffic with a pilot in the loop.
“Additional testing for optimizing the filtering and/or the inclusion of additional technologies to aid in the removal of ground clutter is needed for this radar system to provide adequate reliable detections while flying at low altitudes,” the report concludes, also noting that because the electro-optic cameras on the aircraft were only used to verify track detections, further testing would be needed to evaluate them as an independent technology for detecting non-cooperative aircraft.
“It’s critical that we get this right so that we are safe and compliant in the airspace,” said Michael Thacker, Bell’s executive VP for Technology, Innovation and Commercial Business, in a NASA video associated with the SIO project.
“Bell’s participation in NASA SIO is really about making sure we get the data that the regulators need to be able to understand, not just the aircraft requirements but the system environments for being able to get advanced aerial mobility . . . integrated with the rest of aviation in the national airspace.”



