

Every year, a certain number of single main rotor helicopters crash after entering a state of rotation not desired by the pilot. Some of these accidents occur on the ground or during takeoff, and are obviously the result of the pilot mismanaging the yaw pedals. But the vast majority occur at low airspeeds and altitudes, often while on approach to land, and are chalked up to a more mysterious phenomenon called loss of tail rotor effectiveness (LTE).

According to the Federal Aviation Administration’s (FAA’s) Helicopter Flying Handbook, LTE is an aerodynamic condition that occurs when the flow of air through a tail rotor, which counteracts main rotor torque to control the yaw of a helicopter, is altered in some way. “Unfortunately, the aerodynamic conditions that a helicopter is susceptible to are not explainable in black and white terms,” the handbook warns, but it nevertheless makes the attempt.
The handbook describes three conditions in which external winds can reduce the effectiveness of the tail rotor, whether by blowing the vortices created by the main and tail rotors back into the tail rotor, or by acting on the fuselage of the helicopter to weathervane it into the wind. “LTE is an aerodynamic condition and is the result of a control margin deficiency in the helicopter,” the handbook states, implying that this deficiency is what induces an “uncommanded, rapid yaw toward the advancing blade which does not subside of its own accord.”
Airbus Helicopters begs to differ. The European helicopter manufacturer believes there’s a much simpler, more accurate explanation for what it prefers to describe as “unanticipated yaw” — and pilots don’t need an engineering degree to comprehend it.
Airbus first shared its theory in a 2019 presentation titled “The myth of losing tail rotor effectiveness.” It was not universally well received. Some pilots couldn’t move past the title, which they interpreted as casting doubt on a phenomenon they had experienced for themselves. Others thought that Airbus was trying to deny the existence of what the Helicopter Flying Handbook calls main rotor disc vortex interference and tail rotor vortex ring state, both of which have been demonstrated in wind tunnels and by modeling.
Neither is actually the case, according to Airbus Helicopters flight physics expert David Ferullo, who gave an updated presentation earlier this year at the Vertical Flight Society’s Forum 78 in Fort Worth, Texas. Airbus, which recently launched a new e-learning module on the topic, recognizes unanticipated yaw as a real and persistent problem. The company also acknowledges that vortex interactions will reduce a tail rotor’s efficiency, but contends that because these interactions occur in limited bands of relative wind direction, the most they will cause is a heading change.

Instead of complex aerodynamics, Airbus believes that unanticipated yaw can be better explained by the pedal curve, which plots the pedal position required for a steady hover in a particular helicopter as a function of wind azimuth. The company now has flight test data to back up its theory. “In fact, it is very simple — it’s not rocket science,” Ferullo said. “It is linked to basic flight mechanics.”
Historical context
The origins of the LTE debate extend to the 1970s and the U.S. Army’s experience with the Bell OH-58, the military version of the Bell 206 JetRanger. As Ferullo explained in the paper that accompanied his Forum 78 presentation, the Army experienced a series of puzzling accidents in which OH-58 pilots were unable to stop a right yaw rate with pedal inputs, despite operating within aircraft limitations. (The OH-58 has a counter-clockwise-turning main rotor, so its torque effect tends to yaw the helicopter to the right. The opposite is true in many Airbus helicopters.)
At the time, the Army’s experts speculated that full left (i.e. power) pedal, combined with the left wind component induced at the tail rotor by the right yaw rate, generated such a high blade angle of attack that the tail rotor entered an aerodynamic stall. Their recommended recovery procedure was therefore to remove some left pedal, which they believed would restore the tail rotor’s ability to generate thrust. Guess what: It didn’t work.
Systematic investigations ultimately determined that maintaining full left pedal was most effective in stopping an unanticipated right yaw. Even the admittedly marginal tail rotor on the original OH-58A was reportedly able to stop yaw rates as high as 115 degrees per second if full left pedal was applied.
In October 1983, Bell issued an operations safety notice on the topic with a three-step recommended recovery technique: first, apply full left pedal; second, apply forward cyclic, and recover; and finally, if altitude permits, reduce power. “The tail rotor is continuing to provide thrust,” the notice emphasized. “The time to arrest the yaw rate depends on the magnitude of the yaw rate to be overcome.”
Instead of complex aerodynamics, Airbus believes that unanticipated yaw can be better explained by the pedal curve.
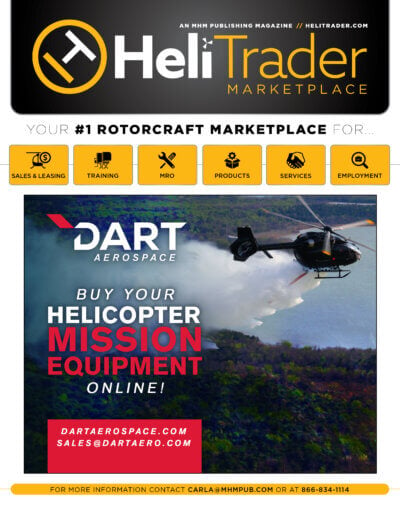
Bell followed up its safety notice with a more expansive information letter on unanticipated right yaw in July 1984. The letter defined the three conditions in which relative winds could induce the state: main rotor disc vortex interference (which occurs with relative wind azimuths from 285 to 315 degrees off the nose of the helicopter), tail rotor vortex ring state (from 210 to 330 degrees), and weathercock stability (120 to 240 degrees). It indicated that once a right yaw rate began in any of these regions, it would be accelerated each time the helicopter passed through the weathercock stability region.
“The aircraft can be operated safely in the above relative wind regions if proper attention is given to controlling the aircraft,” the letter stated. “However, if the pilot is inattentive for some reason and a right yaw rate is initiated in one of the above relative wind regions, the yaw rate may increase unless suitable corrective action is taken.” This time around, Bell slightly revised its recommended recovery technique to indicate that full left pedal and forward cyclic to increase speed should be applied simultaneously.
That information letter became the basis for an FAA advisory circular on unanticipated right yaw in helicopters that was issued in 1995. In turn, AC 90-95 provided source material for the section on LTE in the Helicopter Flying Handbook. Ever since, helicopter flight students have been dutifully memorizing the three conditions that can lead to LTE and their associated wind azimuths, and the FAA’s recommended recovery procedure has called for full left pedal and simultaneous forward cyclic.
Yet, the accidents haven’t stopped. An Airbus analysis of global civil helicopter accidents found 310 events involving loss of yaw control between 2000 and 2016, almost half of them in the U.S. A large majority of those fit the profile of unanticipated yaw, and one out of four accidents resulted in at least one serious injury. In three out of four accidents where information was available, the event took place very close to the ground — too close, in Airbus’s opinion, to allow a safe transition to forward flight.
While the exact number of unanticipated yaw accidents has varied from year to year, they have shown no signs of stopping. While “no big epidemic of helicopters spinning out of control exists,” Ferullo observed, “there is no decrease of the number of accidents. The problem is not improving.”
Understanding the pedal curve
If the 40-year-old explanation of unanticipated yaw contained in the Helicopter Flying Handbook is not the full story, then what is? According to Airbus, it’s all about the pedal trim position.
Imagine a specific helicopter hovering in a no-wind condition. For a given helicopter weight and density altitude, a certain amount of tail rotor thrust will be required to maintain a steady hover, which corresponds to a specific pedal position. In a JetRanger with a counter-clockwise-turning main rotor system, the left (power) pedal will be slightly ahead of the right, perhaps 70 percent of the way toward the left pedal stop (where 50 percent is the position where the pedals are even).
Now introduce a 10-knot wind. When the wind is blowing on the nose of the helicopter, somewhat less power pedal will be needed because the increased aerodynamic efficiency of the main rotor requires less power to hover and therefore less tail rotor thrust. When the wind is coming from the left, even less will be required because the wind complements tail rotor thrust. When the wind is coming from the right — also called the critical wind azimuth — it reduces the efficiency of the tail rotor and requires more left pedal than the no-wind condition.
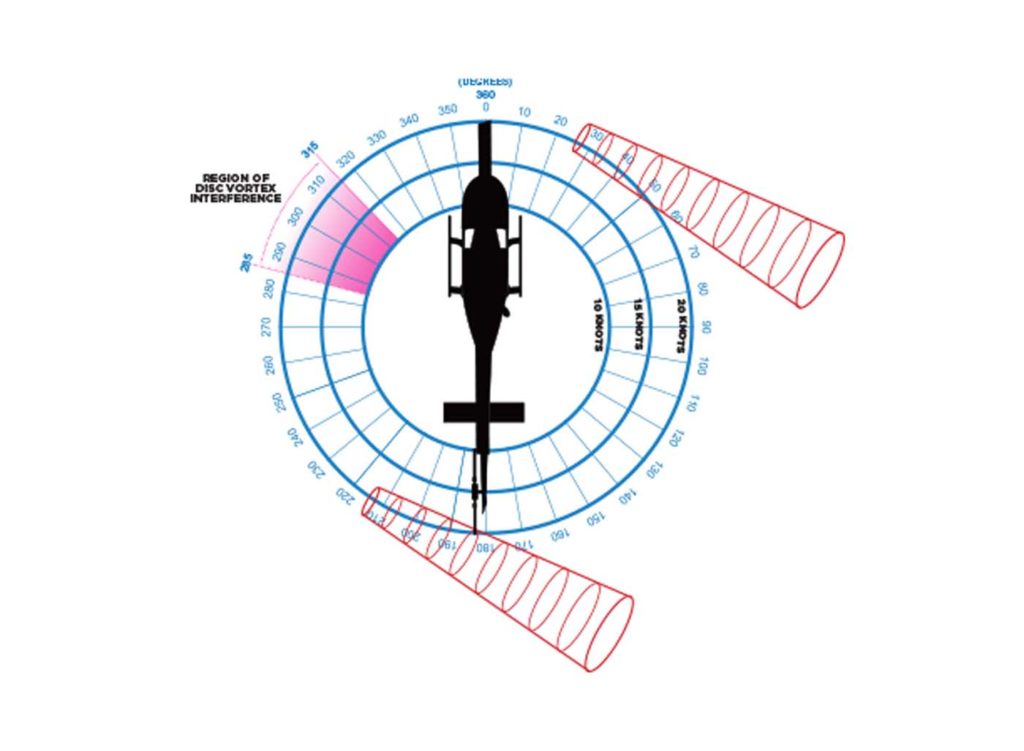
When you plot pedal position as a function of wind azimuth, you get a curve that resembles a sine wave, with maximum left pedal occurring when the wind is from the right, and maximum right pedal occurring when the wind is from the left (these directions are reversed for a helicopter with a clockwise-turning main rotor). At any point along the pedal curve, the helicopter is “in trim,” meaning it will maintain its position. The amplitude of the curve increases as wind speed increases, and will eventually reach a point at which the available tail rotor thrust is insufficient to control the helicopter in a right wind.
Besides changing in amplitude with increasing wind speed, the curve can also shift up or down based on power demand. Raising the collective will shift the curve towards the left pedal stop, which makes intuitive sense, as a heavier helicopter requires more power to maintain a steady hover and thus more tail rotor thrust.
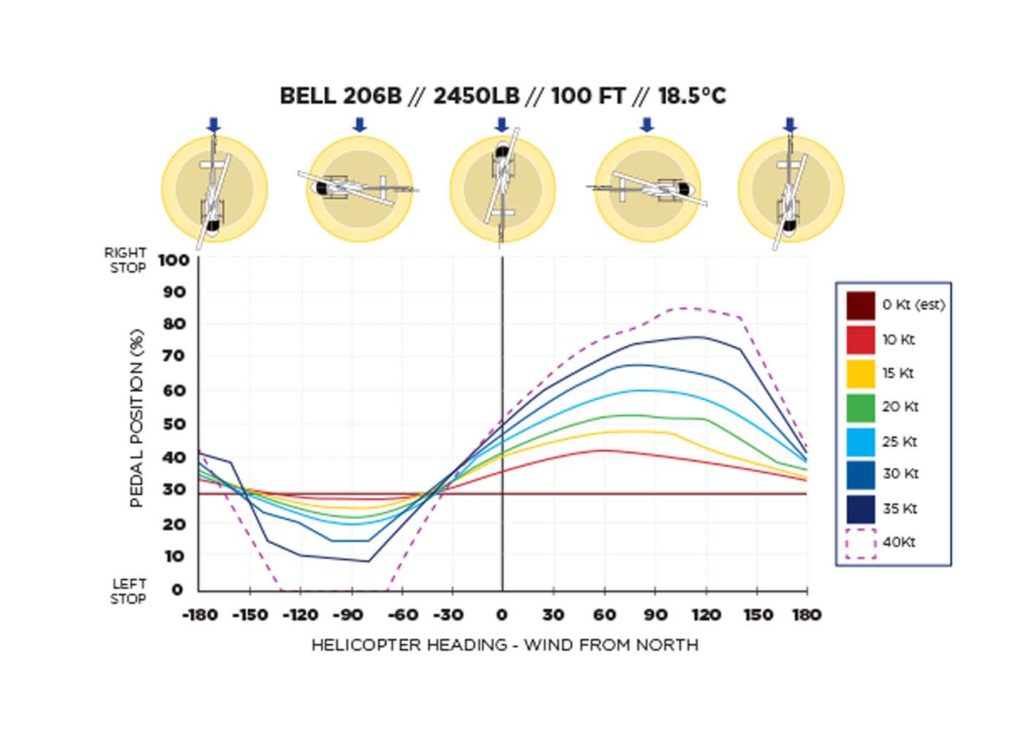
When the wind is coming from anywhere in front of the helicopter, the aircraft is in a stable heading range. A small pedal movement will cause the helicopter to yaw right or left, but it will quickly intersect the pedal trim curve again and maintain its new heading. When the wind is coming from behind the helicopter, the aircraft is in an unstable heading range. The helicopter will yaw much more before reaching its new trim position — this is the well-known weathercock effect.
According to Airbus, unanticipated yaw occurs near the peak and trough of the pedal curve, when the wind is coming from the left or the right. In these conditions, a pedal movement may put the helicopter outside the boundaries of the pedal curve, where instead of finding a new trim condition on its own, it will yaw unendingly without further intervention from the pilot. As Ferullo puts it, “The pilot might expect a step in heading and enters into an endless spinning that he may feel as not commanded.”
While a very small pedal movement can be enough to put the helicopter outside the curve, a much larger correction is necessary to regain a trim condition. Recall also that the pedal trim curve shifts toward the left pedal stop with increased collective, such as is demanded toward the end of an approach.
If the pedal position is already close to the rightmost limit of the trim curve as the collective is raised, and the pilot does not adequately compensate with prompt left pedal, the helicopter will quickly enter an endless right yaw. That may explain why so many unanticipated yaw accidents occur close to the ground on final approach.
Making sense of accidents
In Airbus’s explanation, unanticipated yaw can occur in either direction, right or left, and in fact there are some documented accidents in which the yaw was in the same direction as main rotor rotation. In the vast majority of accidents, however, the yaw was in the opposite direction (i.e. to the right in a helicopter like the Bell 206). What gives?
According to Ferullo, when the power pedal is close to its stop, the pilot is likely paying close attention to the aircraft’s heading. Taking once again the example of a Bell 206, if the helicopter begins to yaw to the left, the situation is easily corrected by removing some left pedal and the pilot has no reason to think that the aircraft is malfunctioning.

By contrast, in the region where the helicopter is susceptible to unanticipated yaw to the right — that is, with a wind from the left — the pedals are not close to a stop and the pilot may not sense that they’re close to a limit. In that case, unanticipated right yaw may be wrongly perceived as a complete loss of tail rotor thrust, as might occur after a tail rotor drive system failure. “Sudden right yaw acceleration occurs in both cases and it is very unlikely that any pilot has sufficient experience of both phenomena to make a clear differentiation,” Ferullo explained.
It should be clear from this that unanticipated right yaw is not the same as running out of left pedal, which is also sometimes lumped under the LTE umbrella. When a helicopter runs out of left pedal, it’s impossible to exceed the left limit of the trim curve. Instead of rotating endlessly, the aircraft will instead find a new trim position with its nose more into the wind.
Airbus validated these ideas in a recent flight test campaign with an H130 helicopter, triggering the unanticipated yaw condition with pedal inputs in both directions, and with a collective increase not compensated with pedal. In all conditions, even with a yaw rate of 120 degrees per second, the pilot was able to recover with a large pedal input opposite to the direction of the yaw, no forward cyclic required.
Setting the question of cyclic aside, however, the traditional recovery technique also calls for full opposite pedal, so why aren’t more pilots able to recover? Ferullo noted that in many accident reports, the pilot states they made an opposite pedal input “that had no effect.” Airbus suspects that pilots are simply underestimating the size and duration of the pedal input required to regain the trim position.
In four accidents for which recorded flight and engine data or cockpit video was available, the pilots had the strong impression of having applied full opposite pedal, but the evidence showed that they didn’t get close. That doesn’t mean that the pilots were lying, but rather that their understanding of a brief and disorienting emergency situation was not quite correct. Improper seating positions and inexperience with making large, abrupt control movements — which are typically not a good thing in a helicopter — are some possible reasons why pilots may fail to make the necessary pedal input.
Pulling it all together
What are the main takeaways from Airbus’s theory? First and foremost, the company wants to restore pilots’ confidence in the ability of the tail rotor to recover from an unanticipated yaw condition.
Airbus worries that the term “loss of tail rotor effectiveness” has led pilots to believe that the tail rotor in an unanticipated yaw condition has ceased to function, at least as well as it should. In fact, any certified helicopter should have plenty of tail rotor authority to recover from the condition, although it may take a large and sustained pedal input to do so.
“Whatever the helicopter design, the only way to recover from the unanticipated yaw phenomenon is to apply a large pedal input opposite to the direction of the yaw and to maintain it until the yaw rotation stops,” Ferullo said.
Airbus also believes that the requirement for forward cyclic should be removed from the standard recovery procedure, especially close to the ground, where it can inadvertently drive the helicopter into terrain or obstacles. As Ferullo pointed out, “most of these incidents occur very close to the ground, meaning that it’s below 30 feet [nine meters]. When you are in a spinning situation, you don’t know exactly where you are.”

Airbus’s theory also has implications for risk management in power-limited situations. The accident record shows that performance is not a factor in most unanticipated yaw events, yet the condition is especially critical when a helicopter is operating close to its performance limits, because the engine may not have enough power available for the large pedal input required to recover. That could lead to an RPM drop on both main and tail rotor, causing the helicopter to descend and jeopardizing the recovery.
Many pilots opt for left crosswind approaches when power is limited (in a helicopter with a counter-clockwise-turning main rotor) since a left crosswind requires less tail rotor thrust and makes more power available for the main rotor. But Ferullo noted that left crosswind approaches are also where the helicopter is most vulnerable to unanticipated yaw.
“Only a few kilowatts [or horsepower] might be spared in left wind conditions on a light helicopter,” he wrote in his Forum 78 paper. “If a large left pedalstep is needed, many tens of kilowatts will be required. Is the small gain worth the risk?”
Robinson Helicopter Company’s Safety Notice No. 42, published in 2013, although not as technically through as the Airbus discussion, concurs with the thinking that “Unanticipated Yaw” is much more of a problem than LTE