

Photos By Heath Moffatt
I was stabilized in a mighty fine hover, thank you very much, when Jim Sleigh, our flight test engineer, asked me, “How would you rate your workload now?” I turned in my seat to share a laugh. He had caught me scribbling on my notepad, feet flat on the floor.

“Workload?! My cat could do this,” I quipped. That was because Thales’ StableLight autopilot was doing all the hard work.
Hovering most light helicopters isn’t a simple business. The state-of-the-art seems to involve some hairy-chested stick-handling of four highly-coupled control axes to manually tame a naturally unstable vehicle. Automation has simplified the task of flying in much of aviation, but to date the autopilot hasn’t penetrated the cost-conscious world of light helicopters. That just changed.
They installed a what?!
To see what four-axis automation does for an Airbus AS350, Vertical Magazine was invited to the impressive new facilities of StandardAero in Langley, British Columbia, where Thales’ new StableLight autopilot was installed on an AS350 B3e/H125 demonstration helicopter. Thales test pilot Nicolas Couder was my tour guide. He kindly gave me the right seat.
Thales has teamed up with StandardAero to certify and market its new light-helicopter autopilot, and the vendor claims that the AS350 was selected as the target machine following an extensive market survey. It was a good choice.

AS350s have enjoyed a long and successful evolution from being an initial product of Aerospatiale, then Eurocopter, and ultimately the highly modernized H125 that Airbus Helicopters produces today (for simplicity, I’ll refer to them all as “AS350.”) About 5,000 have been sold since the model was introduced in 1975, and a varied catalog of optional equipment serves a broad diversity of missions. However, initially only machines equipped with Airbus’s vehicle and engine multifunction display (VEMD), introduced in 2007, will be compatible with the StableLight system, owing to the autopilot’s requirement for digital engine data.
In perhaps a hint that StandardAero sees a light helicopter market beyond the AS350, they have gone to great lengths to keep required avionics to a minimum. The prerequisite equipment is already onboard many helicopters, consisting of inputs from a GPS navigator, a combined or independent air data and attitude-heading reference system(s) (ADAHRS) and a single radar altimeter.
The basic AS350 is delivered with neither an autopilot nor stability augmentation system (SAS). Christian Blagborne, StandardAero’s sales manager, estimates that the installed system will add about 40 pounds (18 kilograms) to a suitably equipped AS350. Impressively, the autopilot kit, as furnished, consists of less than a dozen major components. Installation is foreseen to be well within the competency of any qualified avionics technician.
But first, do no harm
The StableLight interface consisted of the pedestal-mounted control panel and two annunciator lights on the upper instrument panel, adjacent to which were mounted two illuminated trim disconnect pushbuttons. The flight controls had grown several buttons and switches for hands-on mode selection. The installation was tidy and functional. As we’ll see, there is more to say about what is not displayed by the interface.
I was pleasantly surprised to discover that there were no additional preflight tests associated with the autopilot. Upon power-up, the system performed a self-diagnostic and sat idle and ready. An additional benefit was finding that the autopilot-independent force trim powered-up too, holding the flight controls steady during our preflight rituals. Having free use of my two hands gave me a “big helicopter” feeling.
It was a terribly blustery day as we hovered along Langley’s runway 01-19. Challenging conditions and my utter lack of proficiency created an excellent environment in which to test an autopilot.
The system powers up in SAS mode. Automation skeptics may be reassured that they are always only one cyclic push button away from flying a classic, unaugmented AS350, although personally I can’t see the attraction. Flying the unaugmented helicopter reminded me why its French name is Écureuil — Squirrel. The controls are sensitive, and the natural damping minimal, resulting in hover handling that feels somewhat over-caffeinated. Selecting the SAS seemed to soothe the wee, fuzzy creature. The additional three-axis rate damping made the machine more predictable and easier to handle. Any incentive to fly without the SAS evaporated within seconds of lift-off.



A further button press enabled the ATRM mode: StableLight’s term for the attitude-hold function. I should confess to having been traumatized in my youth by badly designed attitude-based control systems. Brand “B” helicopters, as I recall, employed crude cyclic centering springs from the suspension of a 1969 Cadillac Eldorado, creating huge breakout forces, steep gradients and sweaty pilots. I can still hear my long-ago instructors exhorting me to “beep out the forces,” but no beep trim switch can ever keep up with the busy cyclic on a gusty day. Not to sugar coat an opinion, I recall that classical attitude-based control systems usually sucked!
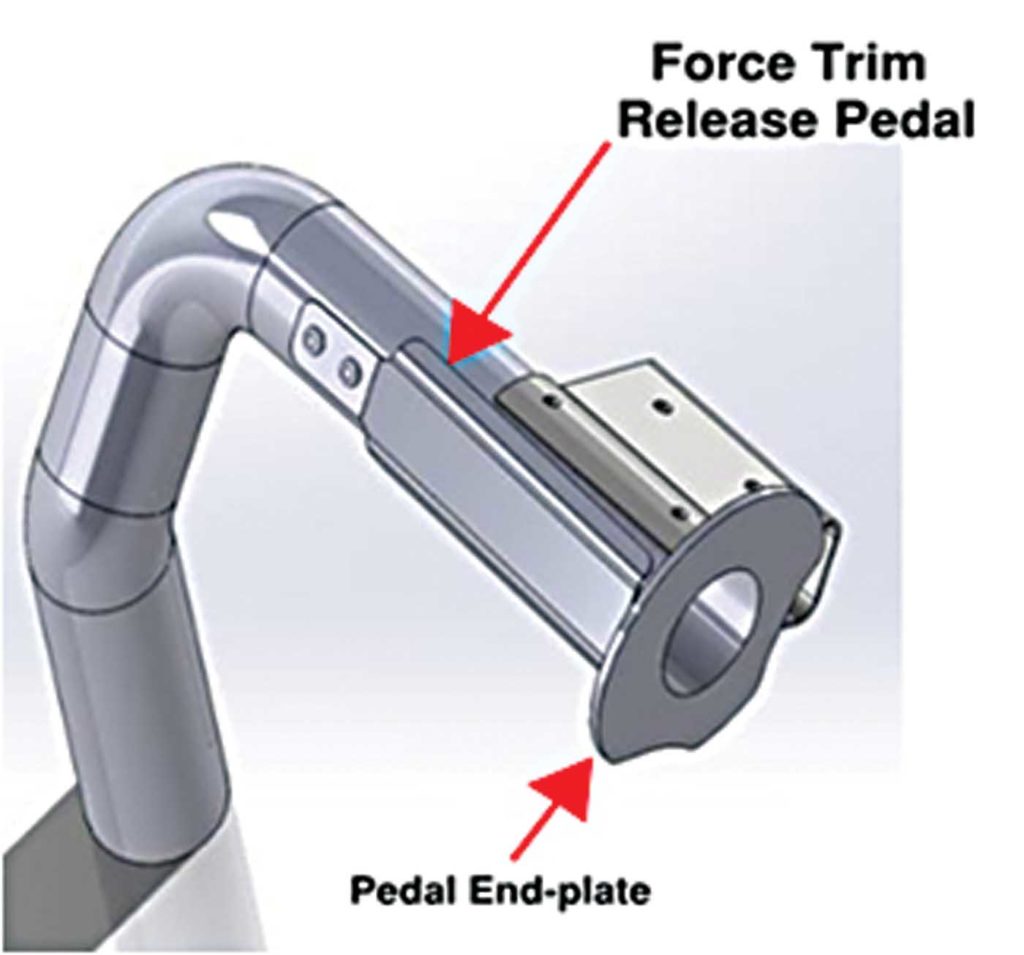
The attitude hold mode (ATRM) is different than the “beep out the forces” autopilots of yesteryear. It wasn’t what I expected, but it was apparently what I wanted. The cyclic beep trim switch, which selects a new reference attitude, is disabled when the cyclic is in motion. It’s a sensible choice, because as a consequence one never feels the autopilot back-driving the flight controls. Upon stabilizing at a new reference attitude, a momentary poke of the cyclic force trim release enables the beep switch with only a barely detectable stick jump. Hand flying in SAS or ATRM modes never gave me the feeling of flying a helicopter through the autopilot, but rather just flying a helicopter; my personal definition of the word, “transparent.”
I quickly learned that I could plant my feet on the floor unless heading changes were required. With the pedals free, the heading-hold feature engaged. It did a fine job, but hovering could be easier still. Couder selected the GPS velocity hold function (VHLD), which resulted in a net zero velocity. Another button press engaged the radar altitude height-hold (RHT), rendering me a grinning spectator. Now lateral and longitudinal cyclic beep switch inputs commanded translational velocity while height and heading could be controlled with a similar switch on the collective. A cyclic-mounted button selected the reference velocity to zero for a quick return to the hover. My cat couldn’t quite do this. You need opposable thumbs.

Couder performs a pre-flight walk around of the aircraft outside the Standard Aero facility. 
The autopilot control panel, shown installed in the aircraft. The system can be fitted on any AStar equipped with Airbus’s vehicle and engine multifunction display. 
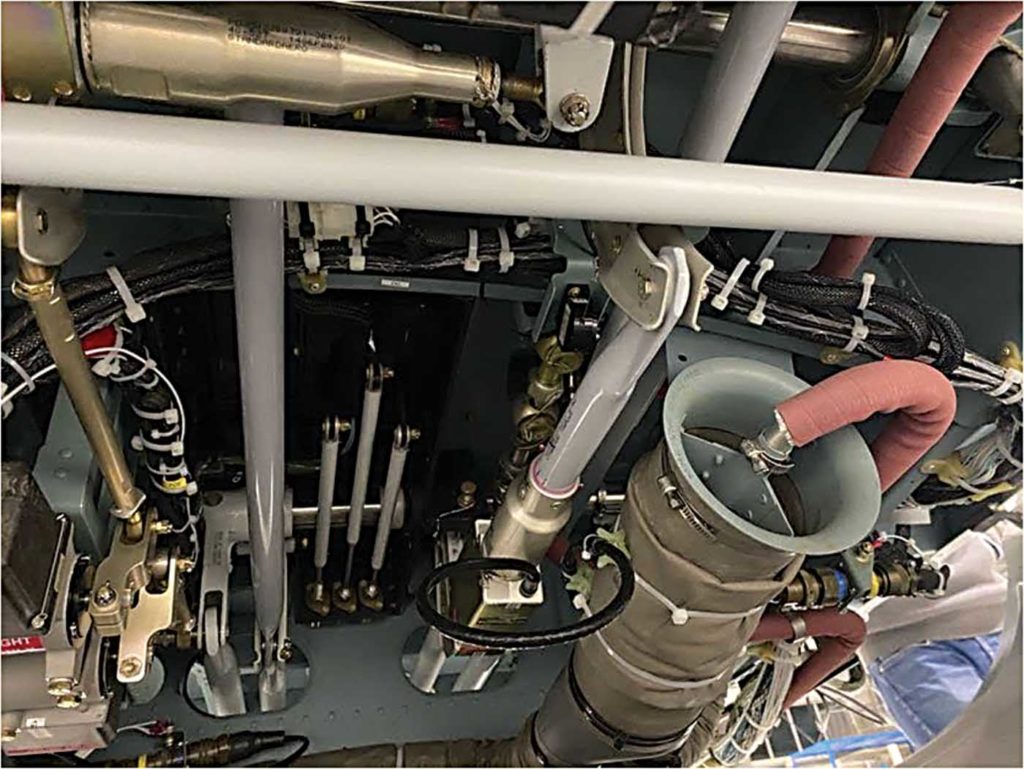
Standard Aero Stableflight autopilot identifier description and location on helicopter. Erdos and Couder discuss the flight and the system’s potential after landing. The system can be fitted on any AStar equipped with Airbus’s vehicle and engine multifunction display. 
The installed system adds about 40 pounds of weight to the aircraft. 
Standard Aero Stableflight autopilot identifier description and location on helicopter.






Designers face inherent compromises with such highly augmented control modes. If the selected flight condition is regulated too tightly, ride quality suffers. If ride quality is emphasized, it results in a looser hover. By way of demonstration, I beeped the helicopter to a lateral velocity of 10 knots, then pushed the cyclic-mounted VHLD “zeroing” button. The response was immediate, but hardly brisk, as the velocity smoothly washed out over 10 seconds and about 100 feet (30 meters). At first, I thought the response a bit tepid compared to the technique I would have employed, but have since reconsidered. Such a system earns its keep when visual conditions are poor and a more aggressive response has the potential to be disorienting. The system’s control algorithms are clearly tuned to be smooth, somewhat at the expense of agility. It’s an ideal compromise.
Beyond stability augmentation
Outbound from Langley airport, we headed for the nearby mountains, giving me a chance to familiarize myself with the system. The individual standard autopilot modes such as altitude, vertical speed or heading were all fully satisfactory. The value of a four-axis system became evident by selecting combinations of modes, such as altitude and airspeed, allowing fully hands- and feet-free operation.
“I can partly blame the gusty conditions, but I was never at peace with the “capture and beep” strategy demanded by the system. I foresee it is a problem that is likely tractable with a bit more training.”
Modes were selected using the control panel pushbuttons, with the helicopter capturing the prevailing flight condition upon engagement. Changes to the selected parameter was via beep trim, with the cyclic beep switch varying either attitude or airspeed. A collective-mounted beep switch controlled altitude, vertical speed or descent gradient, depending upon mode.
In contrast, however, with instrument flight rules (IFR) autopilot installations, the system lacked the sophisticated mode control panel that allows our bizjet brethren, for example, to preselect vertical speeds, altitudes, or airspeeds. The flip-side of StableLight’s simplicity of operation is that while I could couple the system to track an airspeed, for example, it couldn’t display what airspeed I was tracking. Using a switch to control a proportional input without any feedback is hardly an ideal implementation, but it’s the sort of compromise that makes sense for a visual flight rules (VFR)-only system.

A different technique was warranted, using the flight controls to stabilize, and subsequently taking a “snapshot” of the desired flight parameters to be captured. In fairness, I tried. I can partly blame the gusty conditions, but I was never at peace with the “capture and beep” strategy demanded by the system. I foresee it is a problem that is likely tractable with a bit more training.
Autopilot with a survival instinct
Couder selected a gravel bar in the Fraser River to demonstrate StableLight’s coupled approach-to-hover (ATH) capability. From a distance of about a mile, ATH mode was engaged, whereupon the system intercepted a preprogrammed groundspeed-height profile that terminated in a 50-foot (15-meter) hover. Alas, the system cannot display exactly where it will hover, so old VFR skills at visual glide slope estimation were required. After squinting over his outstretched thumb, if the pilot doesn’t like where he’s going, the longitudinal collective beep switch controls descent gradient. Lateral movement of the collective beep turns the approach course, effectively slewing the landing area left or right.
Were the approach unsafe, perhaps due to blowing snow or sand, StableLight stood ready to help. The Go-Around mode, selected via collective pushbutton, smoothly brought the wings level, and captured a 65-knot climb at 1,000 feet (300 meters) per minute, respecting engine power limits. In fact, the Go-Around button was available throughout the flight envelope for immediate recovery to a safe flight condition.

Couder left the best demonstration for last. En route back to Langley airport, following the impressive contours of Sumas Mountain close on the left side, we decided to fly into the hillside. “Let’s turn right,” Couder prompted.
“Left?” I replied as scripted, credibly simulating stupidity; the mountain obscured by the dense fog in my vivid imagination.
“Right,” Couder confirmed. I took it as encouragement and spun the heading knob to the left. Whoops. Presently the windscreen was full of cedar trees and the helicopter terrain awareness system (HTAWS) was screaming. After the red warning annunciation had blared for two seconds, the autopilot lost patience with me. It engaged, rolled level, pulled maximum continuous power, and pitched up to capture the AS350’s 65-knot best rate of climb speed. For the record, it would have saved us.

In summary, the installation of Thales’ StableLight autopilot did three simple things to the AS350 helicopter: it made the helicopter easier to fly, it made it safer, and it enabled it to conduct new and different missions for its operators. Win-win-win, as I see it.